EQDrive для NEQ6 с длиннофокусным телескопом
Хочу поделиться опытом использования EQDrive на монтировке NEQ6 Pro с длиннофокусным телескопом (фокус 2800)
Сначала попробую рассказать, какие проблемы наблюдались при использовании оригинального контроллера от Синты.
Во время гидирования звезда достаточно резво скачет вверх вниз вдоль оси RA в пределах 1-2", что сказывается на аспекте звезд финального снимка. Особенно сильно это заметно на большом фокусе.
До подключения нового контроллера я ставил эксперименты, пытаясь найти причину, или как минимум задокументировать проблему, чтобы можно было понять, улучится ли ситуацию.
Вот перечень используемого оборудования:
- Монтировка NEQ6 Syntreck со шнурком EQDIR, перебрана, смазана, с ремнями вместо шестеренок, заменены штатные подшипники, с усиленным узлом выставления полярки
- ШК11, фокус 2800 без редьюсера. Внеосевой гид
- Камера с пикселем 7.8мкм, на пиксель приходится 0.57"
- Балкон многоэтажного дома
Полярка выставлена достаточно точно. Вот что показывает PoleAlignMax:
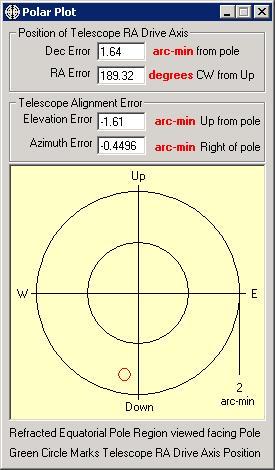
Присутствует минимальный дисбаланс, чтобы нейтрализовать влияние люфта в ЧП.
Гидирование с 3с выдержки (согласно Андрей Иоды) качественного результата не дает - звезда успевает за 3с сместиться достаточно далеко и аспект вырастает до 25-40%
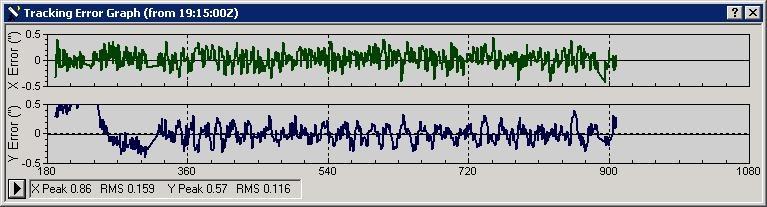
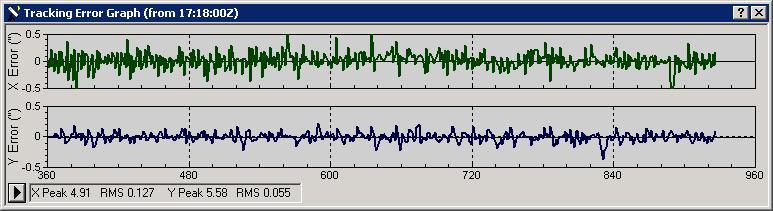
Вот пример графика гидирования по 3с (выброс в конце - скачивание файла, разрыв в начале - перезапуск съемки):
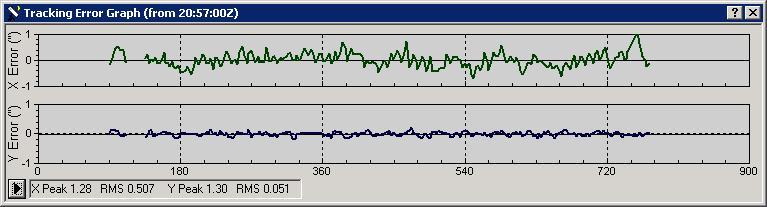
На графике выбрано отображение в арксекундах и по осям телескопа, а не камеры.
Скачки по RA достигают 0.7", по DEC - коррекций практически не делается.
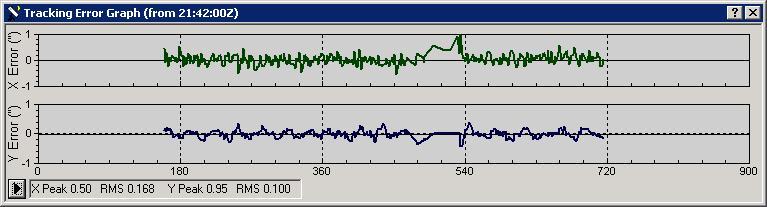
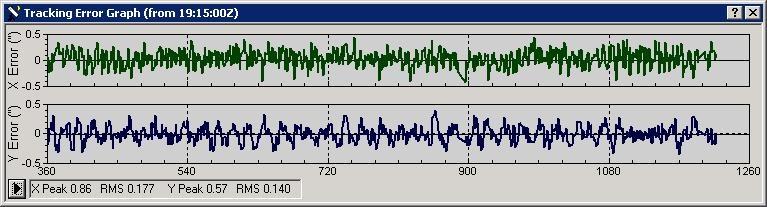
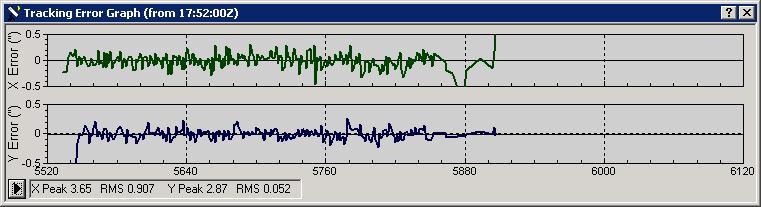
На данный момент единственным спасением является уменьшение выдержки гида до 0.3-0.5с. Да, начинает гулять DEC, как я понимаю, за счет турбуленции, но и размах отклонения по RA уменьшается. Вот график гидирования (частота 0.5с, сильный выброс - между кадрами):
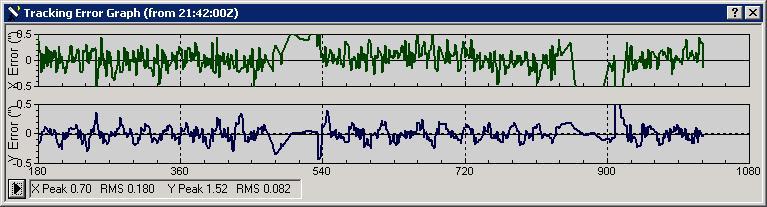
И практически тот же график, но в масштабе 0.5":
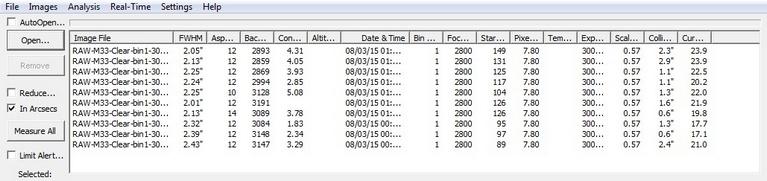
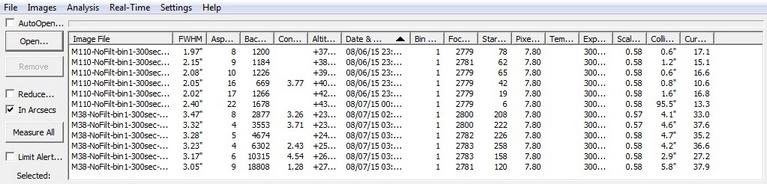
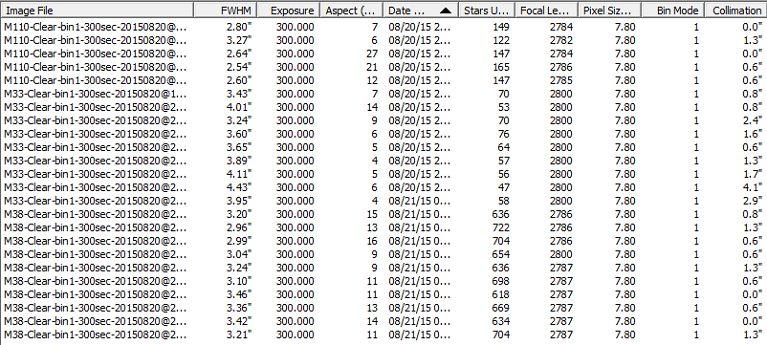
Финальные снимки на таком относительно быстром гидировании получаются приемлемыми. Вот результаты серии снимков по 300 секунд за сегодняшнюю ночь:
По проблеме ведение по RA есть несколько предположений:
- Дефект движков вызывающий кривое движение в микро шаге
- Дефект ременной передачи, а именно, биение шкива, вызванное не соосной расточкой (напомню, оригинальные запчасти поставляются под вал меньшего диаметра, нужно растачивать)
- Дефект или особенность контроллера двигателей.
Я решил попробовать устранить две возможные причины из трех и получить простую возможность устранить и третью. Ну, конечно, не факт, что по итогу не вылезет четвертая, но тут никто не застрахован)
У наших соседей с Украинского астрофорума был приобретен контроллер монтировки , по весьма демократичной стоимости, и еще один комплект шкивов и ремней. Данный контроллер приглянулся в первую очередь из-за внедренного режима работы двигателей без использования микро шага. И именно это дает надежду на более плавное гидирование/ведение.

На сей раз был выбран профиль GT2, широко представленный в Китае, и отличающийся в разы большей точностью позиционирования по сравнению с используемыми в настоящий момент MXL:
Новые шкивы выбирались исходя из желания уменьшить изгиб ремня на моторе (12 зубов в настоящий момент) и при этом сохранить приемлемую редукцию. Получилось найти пары с 16 и 60 зубами (сайт продавца , что дает коэффициент редукции 3.75.
Новые шкивы внутрь корпуса монтировки не помещаются, даже с переделками) Я решил вынести их наружу, что упросит контроль движения, начальную установку и подстройку того же натяжения в процессе эксплуатации.
Идею почерпнул вот тут:

Новая панель будет делаться из алюминиевой пластины толщиной 1.5мм.
Для начала решил сделать временное подключение контроллера, для проверки хода на имеющихся ремнях.
Итак, откручиваем крышку контроллера на монтировке, отключаем моторы и подсветку искателя. Потом берем в руки кусачки и со спокойной душой =) отрезаем старые разъемы.
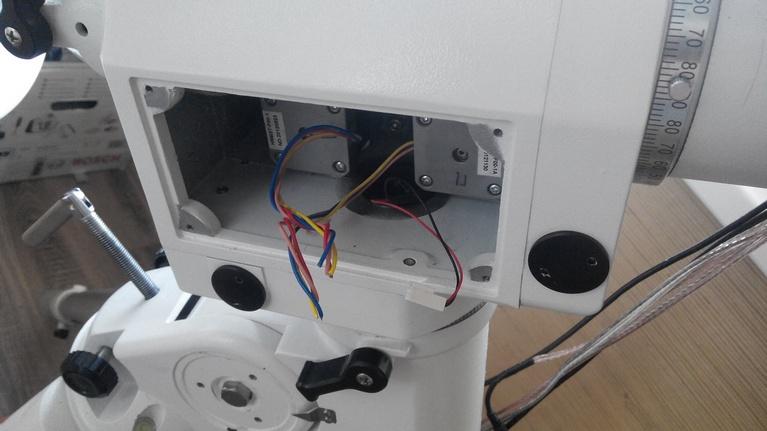
Припаиваем стандартные комовские разъемы. Куда именно припаивать смотрим на сайте разработчика.

Разъемы RA, DEC:
- Обмотка А1
- Обмотка А2
- Пустой (nc)
- Обмотка В1
- Обмотка В2
- Масса (Gnd)
- Масса (Gnd)
- Масса (Gnd)
- Масса (Gnd)
У стандартных моторов NEQ6 пары обмоток нужно вызвонить мультиметром (заодно померял сопротивление обмоток - 7.5Ом), либо ориентироваться на цвета - первая обмотка - синий / оранжевый, вторая - красный / желтый.
Так и припаиваем, 1 - синий, 2 - оранжевый, 4 - красный, 5 - желтый. И больше ничего) Разъем от подсветки искателя оставляем висеть в воздухе.
Контроллер вешаем на хомуты (напомню, временно!), подключаем питание (тот же штекер, тоже напряжение, как в родном контроллере EQ6) и USB кабель:

Включаем питание, устанавливаем драйвер FTDI (уже может быть в системе, но можно взять, например, ), а так же устанавливаем конфигуратор контроллера ()
Смотрим, какой COM порт присвоился контроллеру, запускаем конфигуратор, заходим в Options и выбираем нужный порт. После этого вводим параметры. Производитель порекомендовал попробовать с этих:
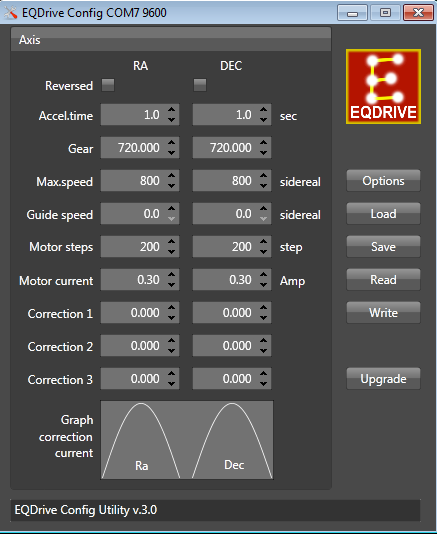
От стандартных они отличаются только коэффициентом редукции 720, который соответствуем имеющимся ремням. Для стандартных шестеренок EQ6 нужно ставить 705. Нажимаем Write и параметры сохраняются в контроллере. Запускаем EQMOD и он успешно соединяется с контроллером.
Как оказалось, полярность подключения движков соблюсти не удалось и монтировка начала крутиться в противоположную сторону от положенного) Ничего, паять ничего не надо, вернулся в конфигуратор и поставил галочки на Reversed для каждой из осей.
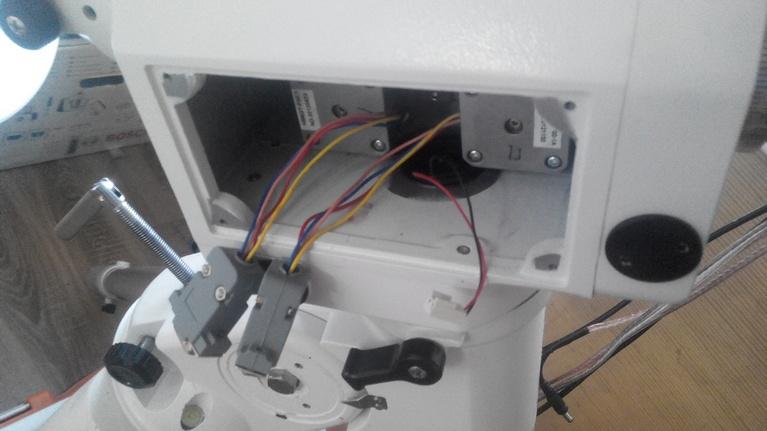
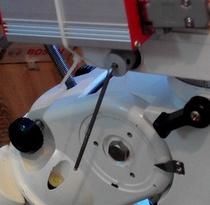
Для проверки плавности хода я открутил крышку, прикрывающую подшипник червяка, одел муфту под диаметр вала 8мм (в корпусе монтировки сбоку есть отверстие, куда можно просунуть шестигранник для закрепления этой муфты), а с другой стороны муфты закрепил длинный шестигранный ключ, который будет использоваться, как индикатор
После этого запустил ведение и визуально оценивал плавность. Почудились небольшие замедления... Выставил Correction 1 параметр в конфигураторе 0.007 - записал, и замедления больше не наблюдались. Для второй оси поставил такое же значение, так как движки одинаковые. Ну и поднял ограничение тока до 0.45A - при этом токе движки не греются, работают корректно. Больший ток не пробовал.
Успел немного погонять по небу. Что можно уже отметить - график гидирования на выдержках 0.5с стал плавнее, обе оси укладываются в +- 0.3", c редкими скачками до 0.5". Наведение точное, быстрое им тихое) Не то, чтобы совсем звука не было, но он стал гораздо мягче.
Следующей ясной ночью повесил оба контроллера один на другой и переключал моторы между ними.
Предварительно подбирал коэффициенты для моторов. Для этого прицепил на червя длинную (20см) стрелку из текстолита (для жесткости), запустил ведение в EQMOD, отключил EQMOD и запустил конфигуратор. Такая последовательность позволяет динамически менять параметры без остановки ведения.
При подборе коэффициентов ориентировался на визуальную плавность ведения и отсутствие дрожания стрелки - в силу относительно большой массы и размера, она начинает трястись при неравномерности движения. Остановился на значении 0.06 для первого коэффициента. Коэффициенты для больших гармоник не менял.
Запустил гидирование с EQDrive, сделал несколько снимков. Потом подключил старый контроллер - калибровка, гидирование, снимки. Да, оказывается, я уже отвык от звука работы двигателей со старым контроллером. Реально громко....
Что я могу сказать, видимо EQ6 испугался, что его сейчас снимут и начал показывать хорошее ведение - лучше, чем было с ним до этого)
Аспект звезд на тестовых с контроллером EQ6 снимках вышел 8-11%, FWHM - 3.2"-3.4". EQDrive контроллер показал такой же аспект (7-10%), но меньший FWHM (2.4"-2.8"). Возможно, из-за сдвига попала немного другая часть неба, более качественная, а может и ведение сказалось.
График гидирования по 0.5с.
EQ6:
EQDrive:
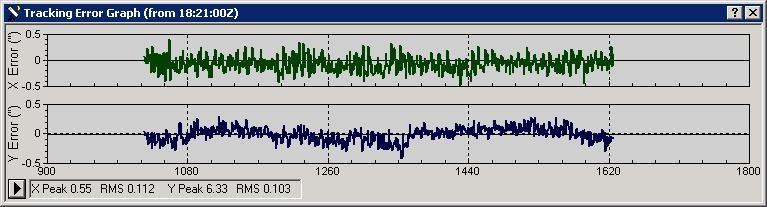
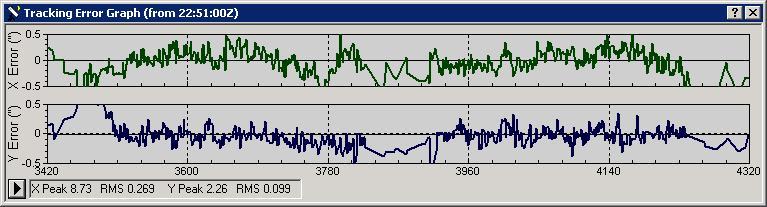
Еще один снимок гидирования EQDrive, уже после подключения оригинального контроллера, судя по всему в настройками гидирования немного не попал:
Оставленный EQDrive успешно отстрелялся до рассвета с такими результатами:
Дальше начался процесс выноса ремней наружу. Снял моторы, выкрутил заглушки на креплении червяка, прикрепил новые шкивы GT2:

Подготовил крепежную пластину для моторов и разъемов:

Делалась из алюминиевого листа толщиной 1.5мм, при помощи дрели и напильника)
Используя новые шкивы, как удобный рычаг для вращения, заметил проблемное место - при несколько активном кручении (в обе стороны) ось двигается рывками, и труба заметно трясется. В прошлый раз, когда настраивал прижим червяка этого не заметил - изнутри совсем неудобно крутить и проблема не проявилась. Попробовал подстроить - пока получилось добиться плавного вращения по RA в строну часового ведение, по DEC - в обе стороны. Буду еще пробовать подстраивать.
Тем временем подстраиваю плавность хода на снятых моторах при помощи нехитрого приспособления)

Остановился на следующих параметрах моторов. Вот снимок конфигуратора:
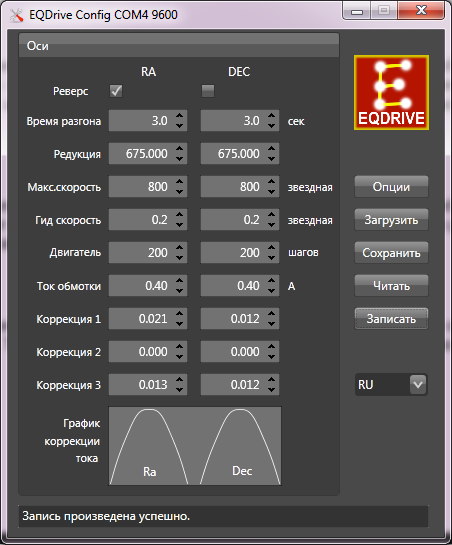
При подборе ориентировался на плавность хода, а также шум и вибрацию на высоких скоростях.
Дальше установил новую пластину с моторами на монтировку. Ставится легко и очень удобно регулировать / контролировать натяжение ремней после установки.

Контроллер повесил на трубу, так как пока не хватает проводов, чтобы поставить его в ящик.
Посмотрел гидирование - хорошо работало и на 0.5с и на 3с. Сравнить со старым контроллером пока не получилось - надо найти ком-папу, чтобы подключиться к новым проводам. А на контакты напаивать, как делал до этого, лень)
Вот пример гидирования с периодом 0.7с. Сильные разрывы - между кадрами. Смущает какой-то синус в графике по RA (X), решил попробовать еще с коэффициентами поиграться и нормально откалиброваться - есть ощущение, что угол гида не совсем верный.
Результаты за ночь также имеются, но они не совсем корректные - я забыл построить новые кривые в фокусмаксе после того, как менял сенсор в камере (он сейчас находится на немного другом расстоянии от корпуса), и, как следствие, результаты фокусировки были просто ужасными).
Следующей ночью попеременно подключал старый контроллер и новый, и смотрел на гидирование. Что можно сказать, если коротко - новый контроллер ведет плавнее. На графике гидирования становится меньше выбросов, за счет этого и звезда мене пухлая и аспект приятнее.
Пример графика гидирования с контроллером EQ6:
Пример графика гидирования с контроллером EQDrive:
Остаток ночи от снимался с EQDrive, результаты для меня хорошие - аспект 4-10%, FWHM: 2.2"-2.8". Тестовые снимки с короткой выдержкой давали порядка 2".
Попробую подытожить =) А, вернее, разложить по полочкам плюсы и минусы. А выводы оставлю на совесть читателей
| Характеристика | Контроллер от NEQ6 | EQDrive standard |
| Необходимость переделки монтировки | Не требуется в случае использования родных шестеренок, значительные в случае переходе на внешние ремни | Минимальные в случае использования родных шестеренок, значительные в случае переходе на внешние ремни |
| Шум при ведении/наведении | Работа моторов хорошо слышна за закрытой дверью балкона | Крайне тихо. Не слышно за закрытой дверью. Шум ведения еле различим |
| Плавность ведения | На большом фокусе хорошо заметны скачки по RA | Правное ведение, скачки по RA значительно меньше |
| Астрофото на фокусе 2800 | Большая часть снимков с аспектом больше 10-15%. В корзину | Большая часть снимков с аспектом 4-10%. |
| Разгон/торможение | Для изменения скорости необходима остановка. Наведение на объект в несколько итераций туда/сюда. | Время разгона/торможения задается в конфигураторе. Плавное увеличение / уменьшение скорости. Наведение без итераций. |
| Возможность подстройки | Отсутствует | Корректировка хода ШД (шаговых двигателей) |
| Связь с компьютером | Необходим EQDir переходник или COM порт для Synscan | USB интерфейс (виртуальный COM порт) |
Небольшое дополнение. Как выяснилось позже, мой MaximDl не совсем верно производил пересчет пикселей гида в арк секунды, хотя все параметры в настройках программы были верно установлены. Так что для получения реальных графиков имеющиеся значения нужно увеличить в два раза. А жаль, я так радовался тому, что выдавала моя EQ6. Хотя и так, результаты более, чем хорошие для данной монтировки.