Моторизированный противовес для NEQ6
Решил произвести небольшую доработку монтировки, а именно, добавить моторизированный противовес.
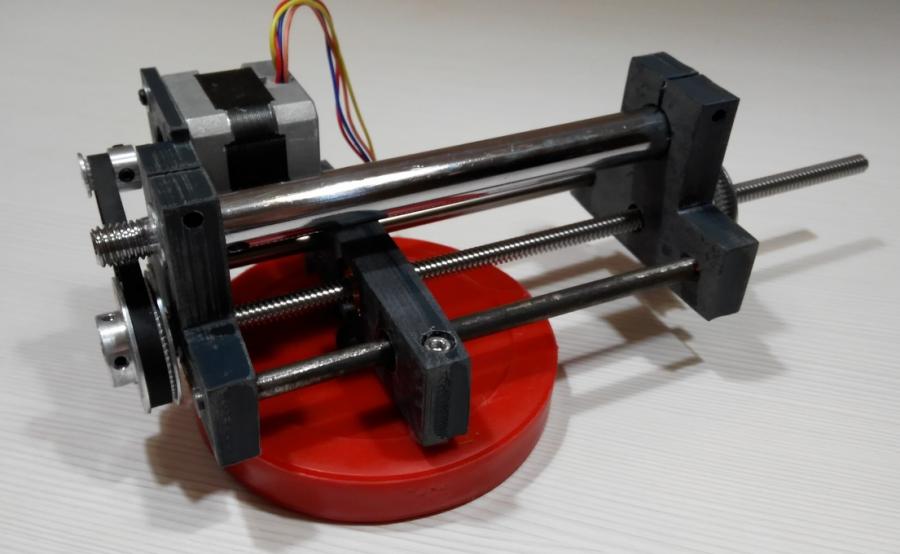
На удлинителе штанги противовесов закрепил две детали, напечатанные на 3D принтере, в них вставлены два вала диаметром 8мм по которым скользят два линейных подшипники. В центре - подшипник и трапецеидальный винт, гайка закреплена в третьей детали, к которой прикручен противовес - блин от гантели, массой 1.5кг. В ней же закреплены линейные подшипники.
Винт крутит шаговый двигатель при помощи ремня GT2 и шпуль с 16 и 60 зубьями (остались после перехода на прямое соединение червяка и вала мотора). Управление возложено на контроллер фокусера с ASCOM драйвером.
В скриптах, которые управляют процессом съемки, добавил логику по проверке положения телескопа и сдвига противовеса в случае, если произошла перекладка.
Полевые испытания показали эффективность подобного решения.
PS: Для надежности можно и нафрезеровать детальки, но раз уж я собрал 3D принтер, то решил им и воспользоваться =)