Установка мотора напрямую на червяк без пром. редуктора (NEQ6 + EQDrive)

Небольшой отчет по использованию EQDrive без пром. редуктора на монтировке NEQ6.
Данный эксперимент я делал с целью избавиться от проблем, связанных с низким качеством китайских шкивов GT2 - несоосность посадочного отверстия и увеличенный его диаметр, что приводило к "болтанке" шкива на червяке.
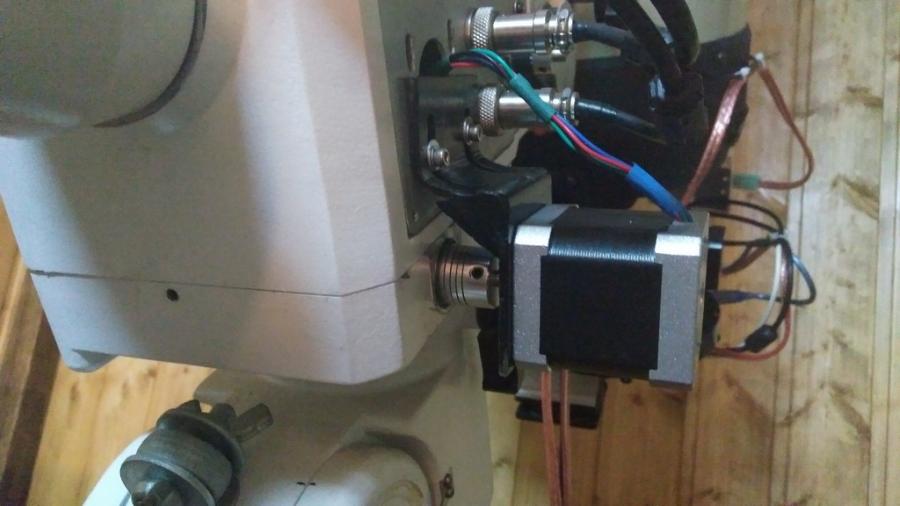
Для установки использовал стандартное крепление для ШД Nema17, выгнув его буквой зю =) Нужную форму придавал при помощи молотка и тисков. Крепление хорошо закрепилось на имеющейся пластине для установки внешних ремней. Моторы с шагом 0.9° (400 шагов на оборот) на ток 1А. Стыковку с червяком выполнил при помощи сильфонной муфты. Соосность червяка и вала мотора выставлялась на глаз, с расчетом на компенсацию несоосности при помощи муфты. В монтировке используются червяки
В настройках EQDrive используется ограничение по току в 0.3A и подобранные коэффициенты компенсации нелинейности хода (по правильности подобранных значений сомневаюсь, возможности точно проверить нет). Коэффициент редукции 180.
После установки двигателя напрямую на червяк появилась возможность выставить ограничение скорости по RA в 1200 звездных. До этого стояло 400 - с большим значением двигатель не справлялся без увеличения тока.
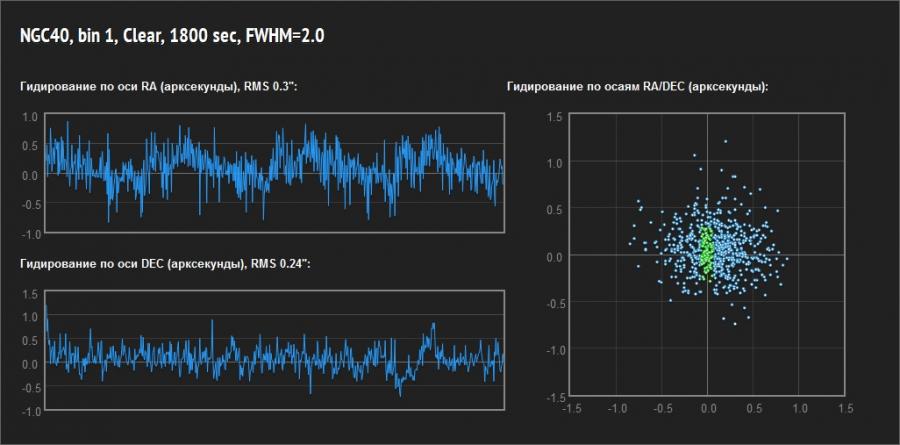
Гидирование по RA шло на скорости 0.4 звездной. RMS на получасовом снимке составил 0.3". Размер звезд на итоговом снимке 2". Съемка велась на Cam86, NEQ6, ШК 11" (фокусное 2.8м), внеосевой гид.
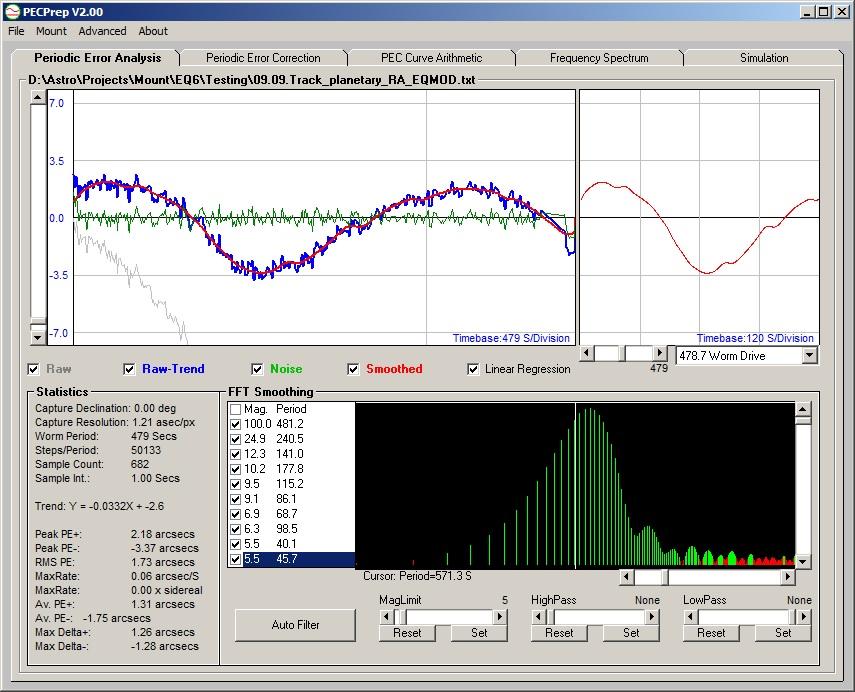
Первыми результатами доволен. Буду еще экспериментировать и попробую снять периодику при такой установке мотора. Остались некоторые моменты по механике (балансировка) - с ними еще предстоит разобраться. Ну и очень хотелось бы подобрать оптимальные коэффициенты для настройки EQDrive под мои моторы. Есть идея взять микронный стрелочный индикатор на стойке, установить его рядом с блинами противовесов в дальней точке, включить ведение, смотреть на плавность изменения показаний и одновременно подбирать коэффициенты. Микронный индикатор (ход 1мм) можно заменить на соточный с ходом в 10мм.
Большое спасибо разработчикам за EQDrive!

Дополнено 09.09.2017:
Перевел ост DEC на аналогичное решение, по оси RA пробовал поставить мотор с редуктором.
EQDrive настроен на редукцию по RA 180 * (26 + 103/121) - у движка по факту редукция не 27:1, а немного меньше. Скорость наведение ограничил в 400 звездных. Эксперимент показал, что больше 500x мотор не выдерживает.
Проведя несколько тестов, решил вернуть обычный двигатель (без редуктора) на ось RA.